Android Database
Comprehensive list of 32 androids from around the world.



4NE-1
The 4NE-1 is a cognitive humanoid robot developed by Neura Robotics. It stands 180 cm tall and features 360-degree vision, full-body tactile sensing, and natural language communication capabilities, aiming to assist in both manufacturing settings and domestic environments. Reservations are open ahead of a Gen 3.5 launch slated for late 2026.
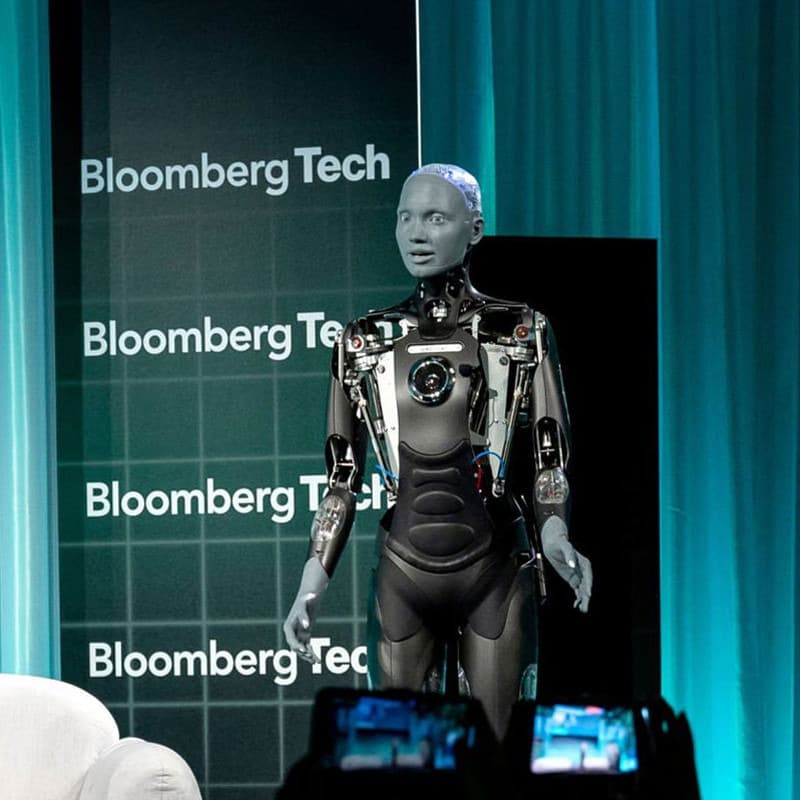


Ameca
Ameca is the world's most advanced human-shaped robot for human-robot interaction. Designed as a platform for AI development, Ameca is the perfect physical avatar for digital intelligence.
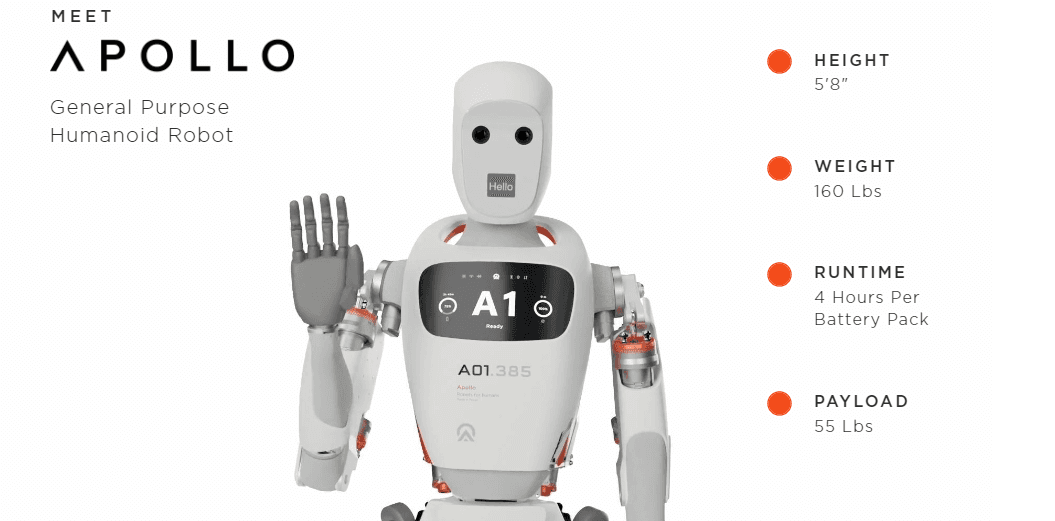


Apollo
Apollo is a general purpose humanoid robot designed for the workforce. It features swappable batteries for 24/7 operation and a friendly face with LED communication.
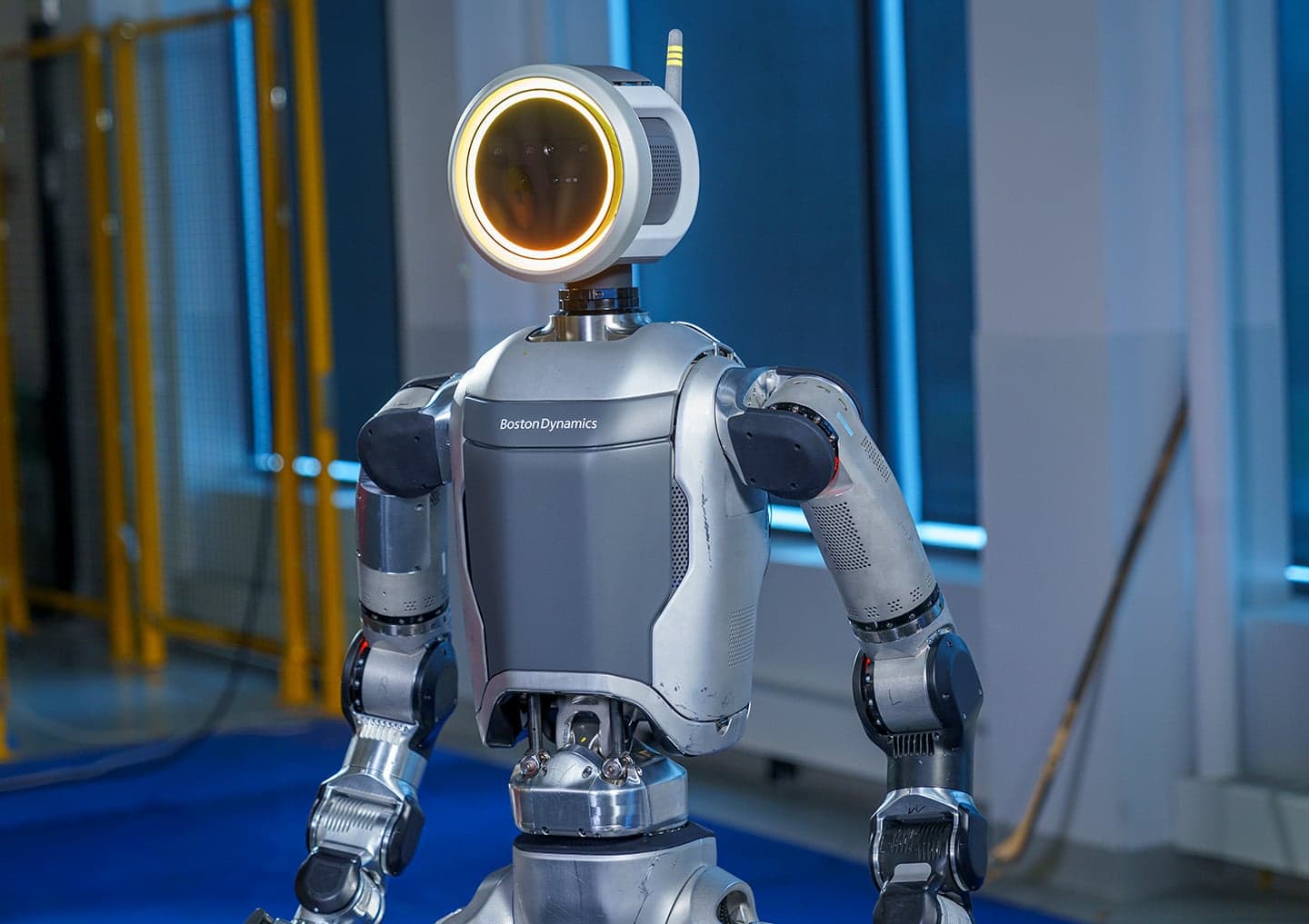

Atlas (Electric)
The fully electric Atlas is designed for real-world applications. It builds on decades of research with the hydraulic Atlas, delivering a robot that is stronger, more dexterous, and fully electric. As of 2026 it has entered production, with fleets committed to Hyundai and Google DeepMind.



CL-1
CL-1 is a testing platform for advanced dynamic locomotion. It uses perception algorithms to climb stairs and traverse complex terrain without relying on pre-mapped data.


Clone Torso
Clone Robotics builds biomimetic androids with synthetic muscles and hydraulic skeletons. Their goal is to achieve 1:1 human strength and durability for a truly robust android.


Cloud Ginger XR-1
Cloud Ginger is a 5G-enabled cloud service robot. It uses flexible joints (SCA) to perform safe interactions, including dancing, serving, and reception duties.
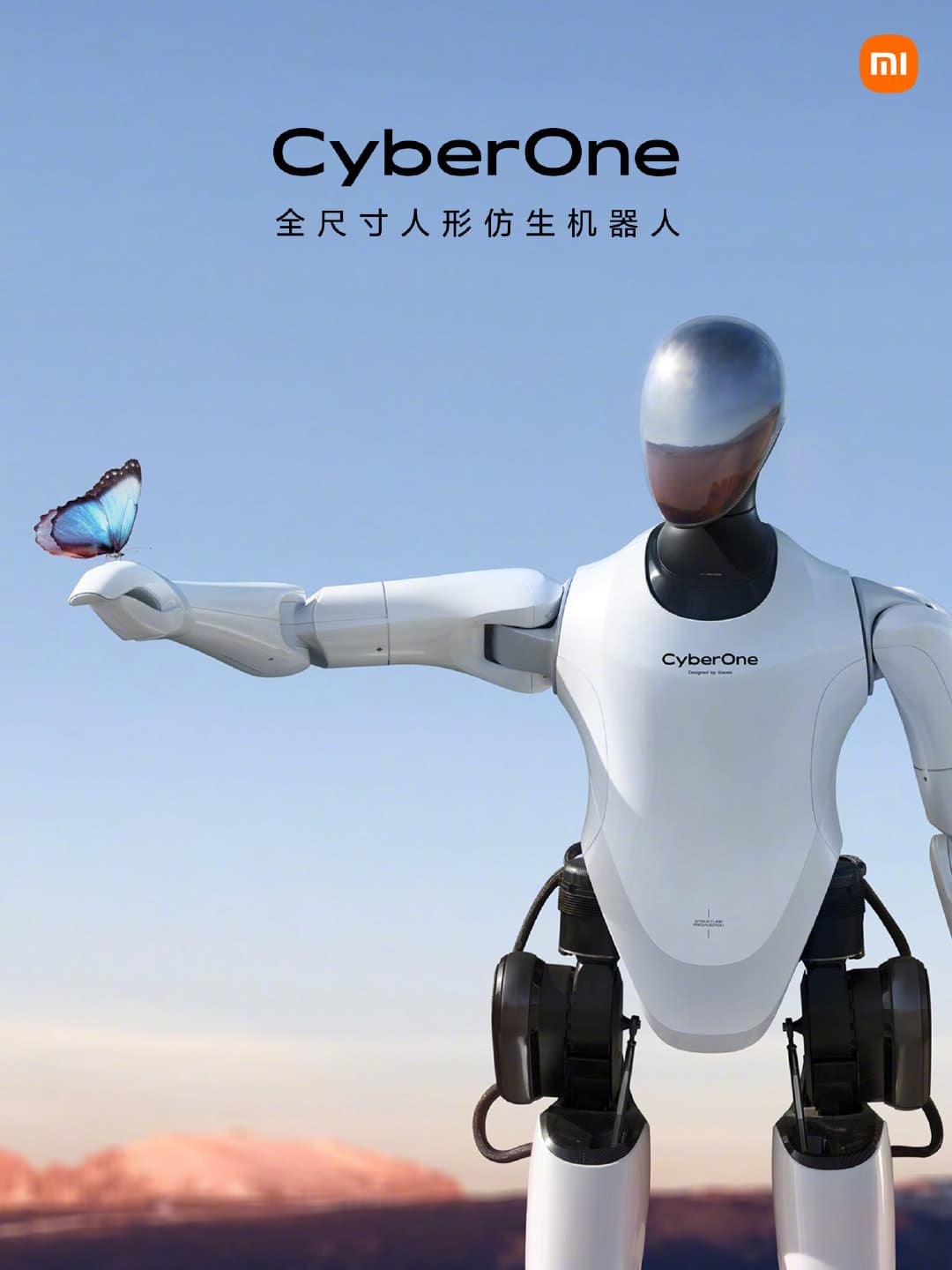

CyberOne
CyberOne is Xiaomi's first full-size humanoid robot. It features an Mi-Sense depth vision module and can perceive human emotion.


Digit v4
Digit is designed for logistics work, specifically moving totes in warehouses. It features unique backward-bending legs for stability and is designed to work safely alongside humans. In 2025 it became the first humanoid to work full-time in a commercial warehouse, moving over 100,000 totes for GXO.



EVE
EVE is a wheeled, self-balancing android designed for logistics and security patrol. It uses the same high-torque, safe motors as NEO but on a wheeled base for efficiency.


Expedition A1
The Expedition A1 is designed for flexible manufacturing tasks. It features modular joints and high-precision manipulation capabilities, aiming to bridge the gap between prototype and mass production.


Figure 02
Figure 02 is the successor to Figure 01, featuring a sleeker design, integrated wiring, and enhanced AI capabilities. It now runs Figure's in-house Helix vision-language-action model and has been piloted on BMW production lines in Spartanburg.


Forerunner K1
Kepler Forerunner is a general-purpose humanoid robot developed in China. It aims to handle tasks in intelligent manufacturing, logistics, and hazardous environments.


G1
The G1 is a compact, affordable humanoid agent designed for education and research. It is incredibly flexible, capable of folding up completely.


Galbot
Galbot is a wheeled humanoid robot designed by Beijing Galaxy General Robot Co. Powered by AstraBrain AI, Galbot executes complex domestic and retail tasks autonomously, adapting in real-time to physical disturbances. It is deployed in autonomous convenience stores across Beijing.


GR-1
GR-1 is a general-purpose humanoid robot with a focus on rehabilitation and elderly care. It has extremely strong legs capable of lifting patients, and was one of the first humanoids to reach mass production.

GR-2
GR-2 is the second-generation humanoid platform from Fourier Intelligence. Built with a 'Made for AI' architecture, it features 53 degrees of freedom and highly dexterous 12-DoF hands with tactile feedback for advanced research, manufacturing, and healthcare tasks.

H1
H1 is a full-size general purpose humanoid robot, known for its high speed running and stability. It holds the world record for fastest humanoid running speed.


Kuavo
Kuavo is a modular bipedal humanoid robot developed by Leju Robotics. Powered by Kaihong OS, it is designed with high payload capability and modularity (supporting wheeled leg swaps) for tasks across manufacturing, security, and elderly service. Over 100 units have been delivered, including deployments on car assembly lines.

Menteebot
A personalized humanoid robot that integrates AI across all levels of operation. It can learn new tasks from natural language commands and visual demonstrations.



Mirokai
Mirokai is a radical departure from standard humanoid design. It floats on a ball-bot base and features a stylized, animated face. It is designed to assist nurses by moving equipment in hospitals, and is now entering its first commercial deployments.

NEO
NEO is designed for the home. It uses tendon-driven anatomy (rope-like muscles) to be safe, silent, and gentle around humans. 1X opened consumer pre-orders for NEO at $20,000 (or $499/month) with deliveries beginning late 2026.


Optimus Gen 2
A general purpose, bi-pedal humanoid robot capable of performing tasks that are unsafe, repetitive or boring. Gen 2 features faster actuators and tactile sensing, and is being trialled inside Tesla's own factories.



Phoenix
Phoenix features industry-leading dexterous hands designed to replicate human fine motor skills. It is powered by the Carbon AI control system, and is piloted with enterprise partners such as Magna.


Punyo
Punyo is a "soft" robot designed to embrace and carry large, bulky items using its whole body (chest, arms, and torso) rather than just hands, making it safer for human environments.


PX5
The PX5 shares technology with XPENG automobiles. It is designed with a rigid, shock-absorbing skeleton and is intended for household service and companionship. XPENG has since iterated toward its next-generation IRON humanoid.



Rainbow Biped
A general purpose bipedal robot from Rainbow Robotics, the KAIST spin-off behind the DARPA-winning HUBO. The company now also ships the RB-Y1 wheeled bimanual manipulator as a research platform.


S1
Astribot S1 is known for its astonishing speed and precision. It can execute household tasks like folding clothes, pouring wine, and opening bottles faster than an average human. Commercial deliveries began in China in late 2025.



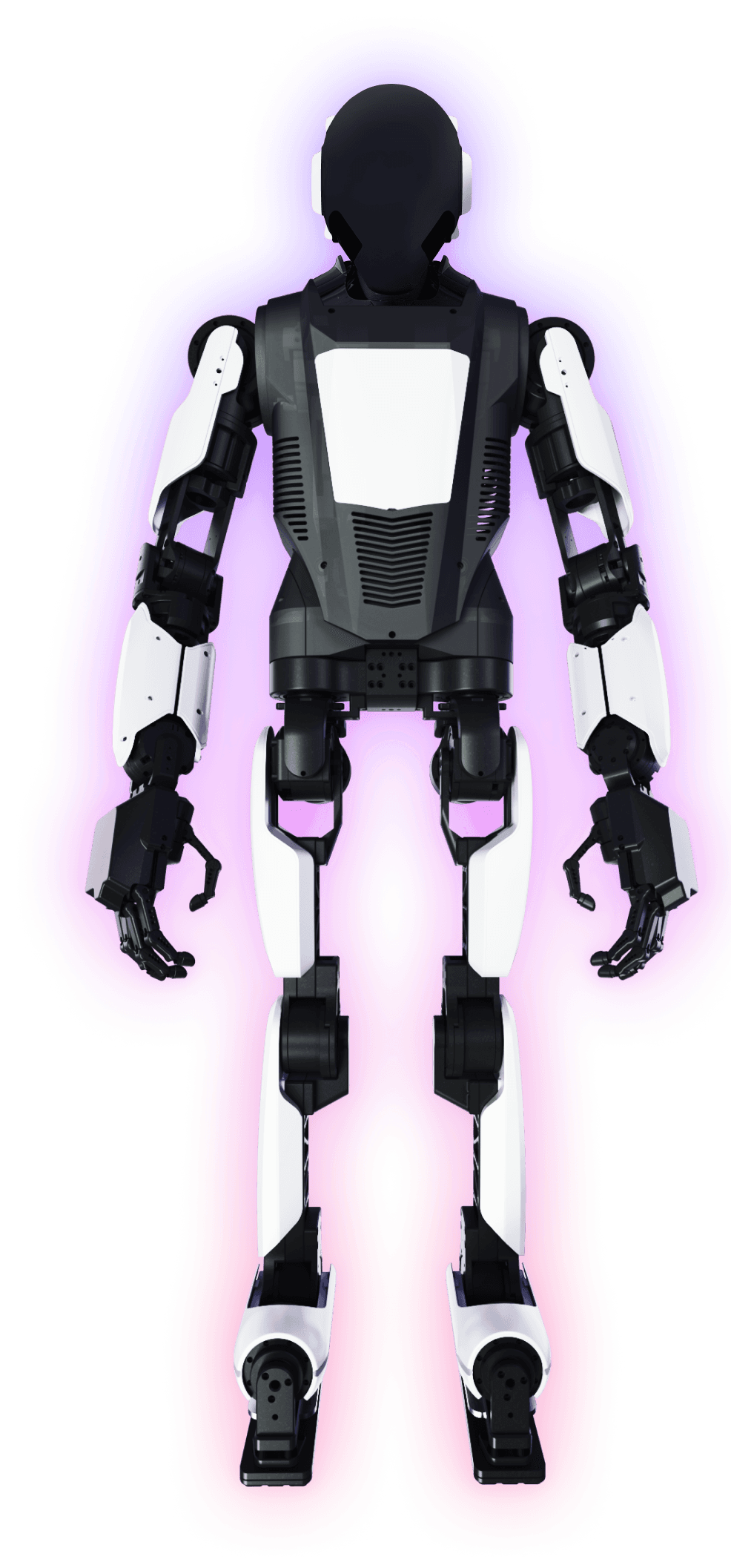
TALOS
TALOS is a fully torque-controlled humanoid robot designed for advanced research in complex industrial tasks. It can manipulate heavy tools and walk on uneven ground.


Tiangong
Tiangong is a state-of-the-art open-source electric humanoid robot developed by the Beijing Humanoid Robot Innovation Center. Capable of running at speeds up to 12 km/h and traversing rugged outdoor terrains, Tiangong is used globally to test advanced motion control algorithms. Tiangong Ultra won the world's first humanoid half-marathon in April 2025.


Walker S
Walker S is the industrial version of UBTECH's Walker series. It is currently deployed in NIO assembly lines for quality inspection and seat belt testing, with the successor Walker S2 entering mass production.


XBot-L
The XBot-L is the first humanoid robot to navigate the Great Wall of China. It emphasizes stability and robust locomotion over varied terrain using reinforcement learning.